د محصول




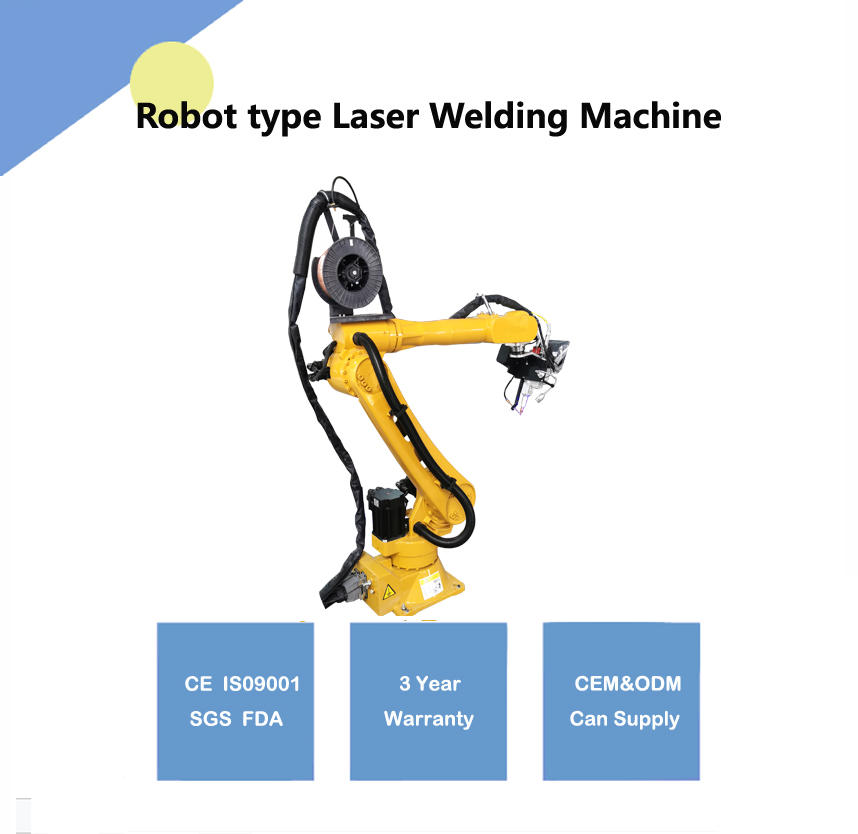
د روبوټ ډول لیزر ویلډینګ ماشین
د محصول ښودنه
تخنیکي پیرامیټر
| شپږ محوري روبوټ | ټولینګ | اصلي برخې | د لیزر سرچینه |
| کارول | د ویلډ فلز | اعظمي. د وتلو ځواک | ۲۰۰۰ واټه |
| د تطبیق وړ مواد | فلزي | سي این سي یا نه | هو |
| د یخولو حالت | د اوبو یخ کول | بریښنایی او نیوماتیک سیسټمونه | شنایډر |
| د طول موج | ۱۰۹۰ ملي متر | د لیزر ځواک | ۱۰۰۰ واټ/ ۱۵۰۰ واټ/ ۲۰۰۰ واټ |
| وزن (کیلوګرامه) | ۶۰۰ کیلوګرامه | تصدیق | سي ای، آیسو۹۰۰۱ |
| اصلي برخې | د فایبر لیزر سرچینه، فایبر، د لاسي لیزر ویلډینګ سر | د پلور مهم ټکي | لوړ دقت |
| دنده | د فلزي برخې لیزر ویلډینګ | د فایبر اوږدوالی | ≥۱۰ متره |
| د تطبیق وړ صنعتونه | هوټلونه، د جامو دوکانونه، د ودانیزو توکو دوکانونه | اصلي برخې | د لیزر سرچینه |
| د کار کولو طریقه | نبض شوی | د تضمین وروسته خدمت | آنلاین ملاتړ |
| د فوکل سپاټ قطر | ۵۰ مایکرو متره | اعظمي پوښښ | ۱۷۳۰ ملي متره |
| د ویډیو وتلی تفتیش | ورکړل شوی | د ګرافیک بڼه ملاتړ شوې | اې آی، پلټ، ډي ایکس ایف، ډي ډبلیو جي، ډي ایکس پي |
| د اصلي ځای | جينان، د شان دونګ ولايت | د تضمین وخت | ۳ کاله |
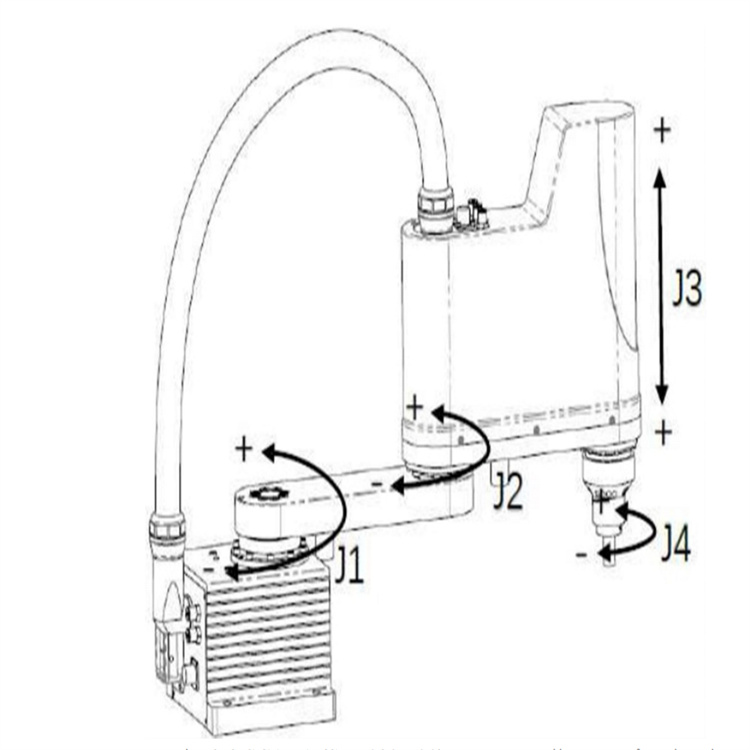
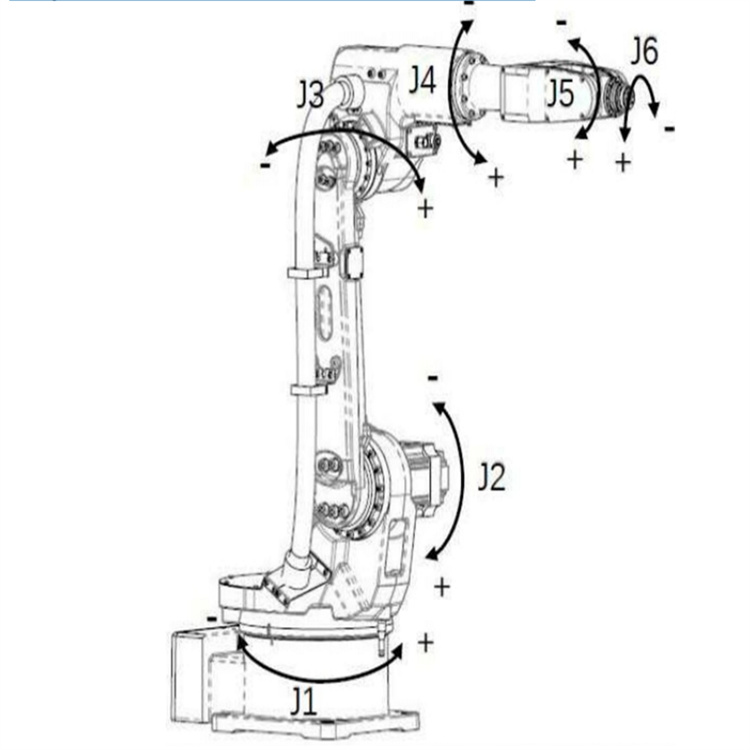
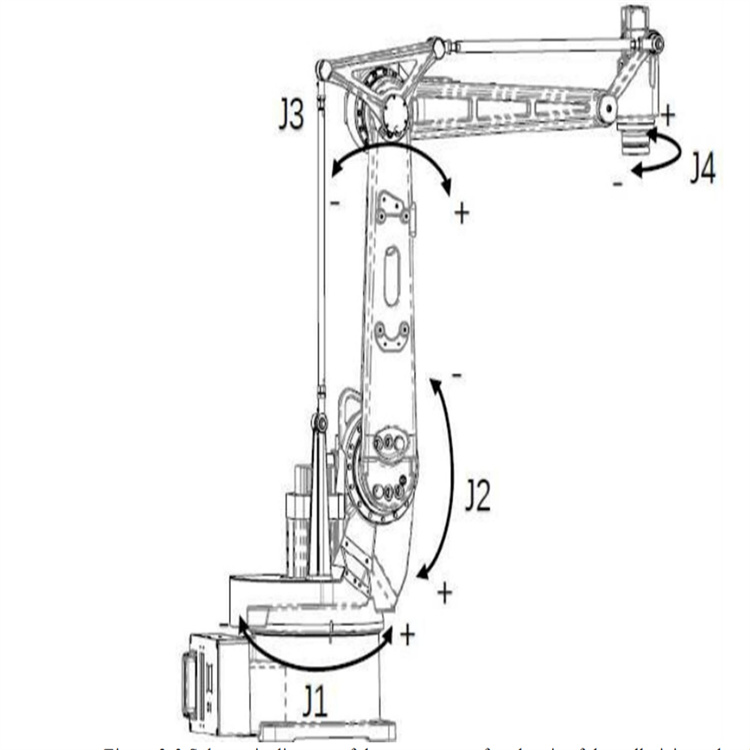
د روبوټ لاس
د روبوټ محور کولی شي د څرخيدونکي محور یا د ژباړې محور وي، او د محور د عملیاتو حالت د میخانیکي جوړښت لخوا ټاکل کیږي. د روبوټ محور د روبوټ بدن د حرکت محور او بهرني محور ویشل شوی دی. بهرنۍ شافټ په سلایډینګ میز او موقعیت کونکي ویشل شوی دی. پرته لدې چې بل ډول مشخص شي، د روبوټ محور د روبوټ بدن د حرکت محور ته اشاره کوي.
د تورینګ روباټونه په درې ډوله صنعتي روباټونو ویشل شوي دي:
صنعتي شپږ محوري روبوټ: د شپږو گردش محورونو په ګډون
SCARA: درې گردش محورونه او یو د ژباړې محور لري
د پالیټ کولو لاس وهونکی: د څلورو څرخیدونکو شافټونو په ګډون د روبوټ ګډ حرکت په انځور کې ښودل شوی.
د روبوټ ویلډینګ ماشین کارول
۱. د ماشینونو د جوړولو ساحه
د ماشین جوړولو په صنعت کې د ویلډینګ دندو د شدت سره، د ویلډینګ عملیات په طبیعي ډول خراب کاري شرایط او د تودوخې لوی وړانګې لري، کوم چې یو خورا خطرناک کسب دی. د ماشین جوړولو په برخه کې ډیری لوی تجهیزات هم شتون لري، کوم چې د ویلډینګ مشکل هم زیاتوي. د ویلډینګ روبوټ یو اتوماتیک میخانیکي تجهیزات دي چې د ویلډینګ کار کې بوخت دي، کوم چې د کارګرانو د کار شدت آزادوي او د ماشین جوړولو په برخه کې د اتومات کولو کچې ښه کولو کې مرسته کوي.
۲. د موټرو او موټرو پرزې:
په دې وروستیو کلونو کې، د خلکو د اړتیاوو د پوره کولو لپاره، د موټرو صنعت متنوع پرمختګ ښودلی دی. دودیز ویلډینګ نشي کولی د موټرو او موټرو پرزو تولید لوړ ویلډینګ اړتیاوې پوره کړي.، د ویلډینګ سیم ښکلی او ټینګ دی. په ډیری عصري موټرو تولید ورکشاپونو کې، د ویلډینګ روبوټ اسمبلۍ لاینونه جوړ شوي دي.
۳. برېښنايي وسایل:
د برېښنايي تجهیزاتو ساحه د ویلډینګ کیفیت لپاره نسبتا لوړې اړتیاوې لري. په ټولنه کې د برېښنايي تجهیزاتو د زیاتیدونکي غوښتنې سره، برېښنايي تجهیزات هم د ګړندي پرمختګ په وخت کې له سختو ننګونو سره مخ دي. د ویلډینګ روبوټونه کولی شي د ویلډینګ کیفیت ثبات کړي پداسې حال کې چې د تولید موثریت ډاډمن کړي. د تجهیزاتو دقیق ویلډینګ د لاسي کار په پرتله درې څخه تر څلور ځله لوړ دی.
۴. فضايي حریم:
د الوتکې په جوړښت کې، د بدن نږدې ۱۰۰۰ د ویلډینګ برخې شتون لري، او نږدې ۱۰۰۰۰ برخې پکې شاملې دي. د الوتکې ډیری مهم بار وړونکي برخې د ویلډینګ برخو څخه کار اخلي. د الوتنې پرمهال د الوتکې بدن تر ډیر فشار لاندې وي، نو د ویلډینګ اړتیاوې نسبتا سختې دي، او د ویلډینګ روبوټ کولی شي د اتوماتیک ویلډینګ سیم تعقیب ټیکنالوژۍ له لارې د ویلډینګ پیرامیټرې په انعطاف سره تنظیم کړي ترڅو د الوتکې جوړښت په سمه توګه ویلډ کړي.
د ماشین ساتنه
- د تار د تغذیه کولو میکانیزم. په شمول د تار د تغذیه کولو واټن نورمال دی، ایا د تار د تغذیه کولو کانال زیانمن شوی، او ایا غیر معمولي الارم شتون لري؛ ایا د ګاز جریان نورمال دی؛ ایا د ویلډینګ مشعل د خوندیتوب محافظت سیسټم نورمال دی. (د خوندیتوب محافظت کار لپاره د ویلډینګ مشعل تړل منع دي)؛ ایا د اوبو گردش سیسټم په نورمال ډول کار کوي؛ د TCP ازموینه (سپارښتنه کیږي چې د ازموینې پروګرام ترتیب کړئ او د هر شفټ وروسته یې پرمخ بوځي)
۲. هره اونۍ تفتیش او ساتنه
۱. د روبوټ هر محور پاک کړئ؛ د TCP دقت وګورئ؛ د پاتې تیلو کچه وګورئ. ; وګورئ چې ایا د روبوټ د هر محور صفر موقعیت دقیق دی؛ د ویلډینګ ماشین د اوبو ټانک شاته فلټر پاک کړئ. ; فلټر د کمپریس شوي هوا داخلولو کې پاک کړئ؛ د ویلډینګ مشعل په نوزل کې ناپاکۍ پاک کړئ ترڅو د اوبو جریان بند نشي؛ د تار تغذیه کولو میکانیزم پاک کړئ، پشمول د تار تغذیه کولو څرخ، د تار فشارولو څرخ او د تار لارښود ټیوب؛ وګورئ چې ایا د نلی بنډل او لارښود تار نلی زیانمن شوی یا مات شوی دی. (سپارښتنه کیږي چې د نلی ټول بنډل لرې کړئ او د فشار شوي هوا سره یې پاک کړئ) ; وګورئ چې ایا د ویلډینګ مشعل خوندیتوب محافظت سیسټم نورمال دی او ایا د بهرني بیړني بند تڼۍ نورمال دی.